Faster path planning for rubble-roving robots
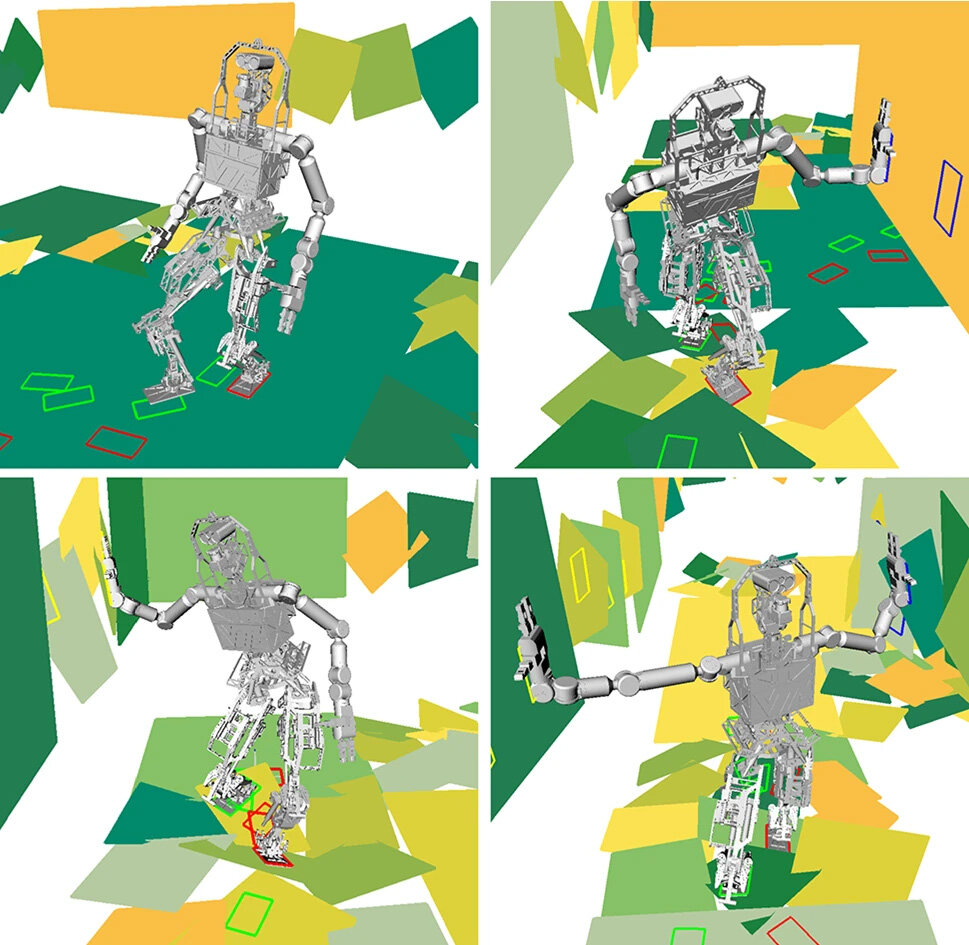
A new algorithm speeds up path planning for robots that use arm-like appendages to maintain balance on treacherous terrain such as disaster areas or construction sites, researchers at the University of Michigan have shown. The improved path planning algorithm found successful paths three times as often as standard algorithms, while needing much less processing time.
A new algorithm speeds up path planning for robots that use arm-like appendages to maintain balance on treacherous terrain such as disaster areas or construction sites, researchers at the University of Michigan have shown. The improved path planning algorithm found successful paths three times as often as standard algorithms, while needing much less processing time.